
Here I proudly present to you my second robot: the Bot in a Box. Guess what? He uses a plastic food box for his chassis.
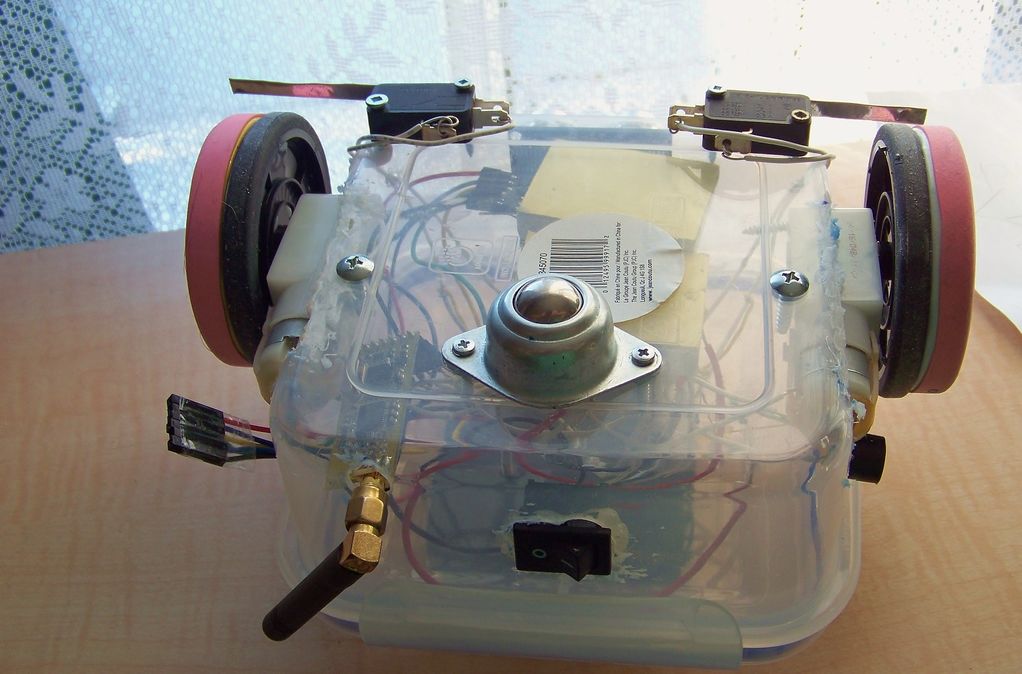
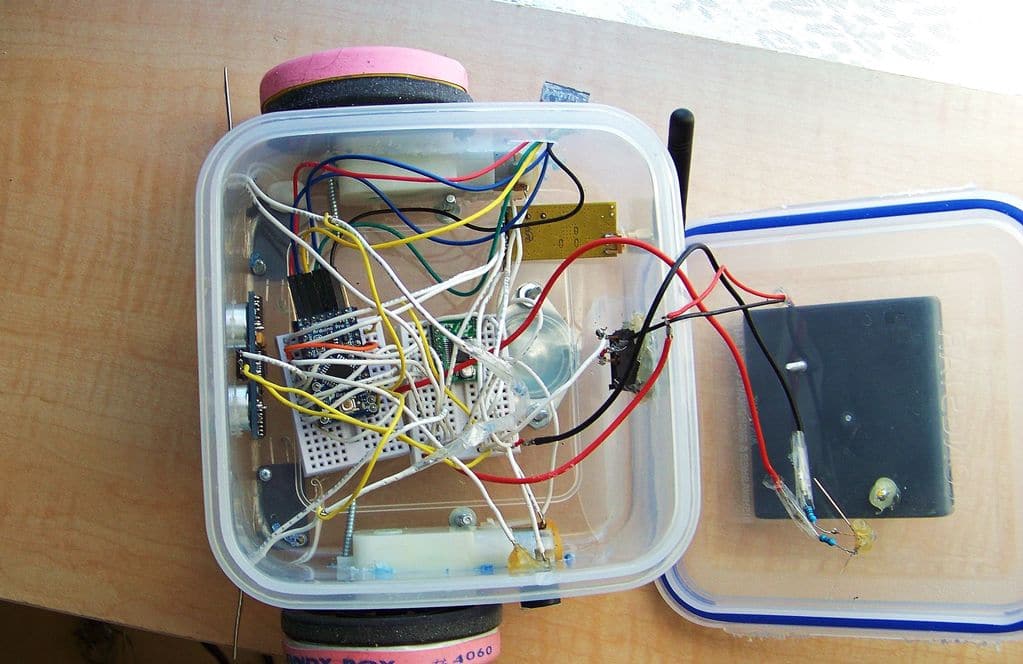
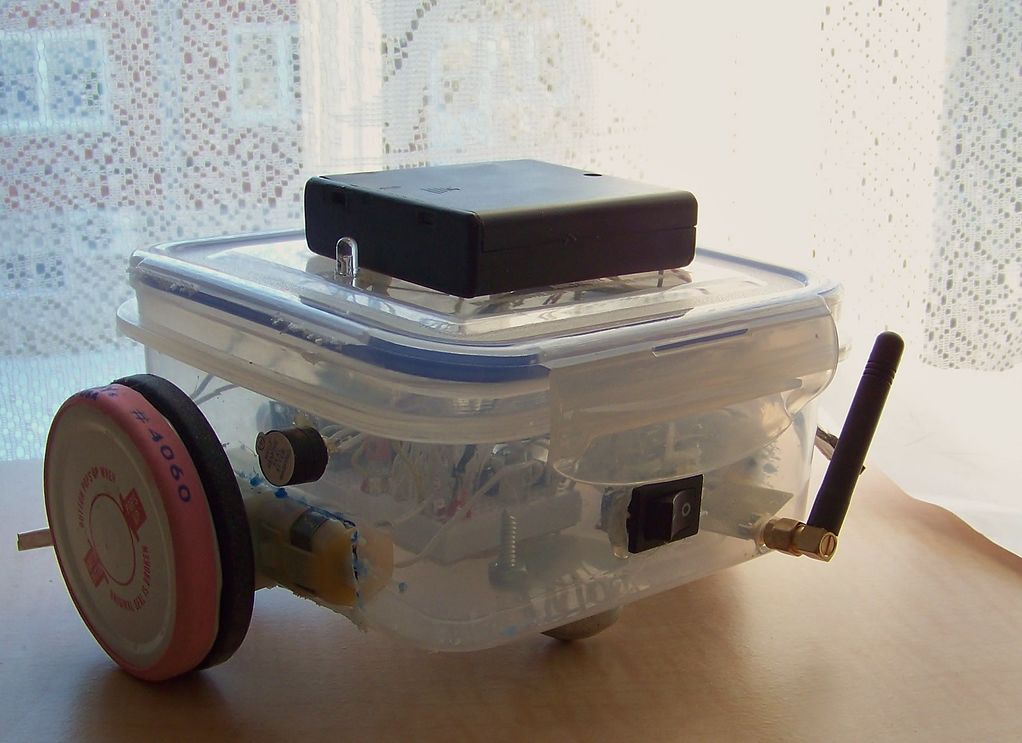
I consider him a robotic platform, not a stand-alone robot. I plan to outfit him with a RaspberryPi, a camera, and a microphone. For now, the robot has a PING sensor and two microswitches (as bumpers). He uses two motors for a 2WD (differential) and has a caster wheel at the back. Bot in a Box has a convenient ON/OFF switch, a conveniently placed 4xAA battery holder, an indicator LED and buzzer, and an external FTDI “port”.
For electronics, the bot uses an Arduino Mini Pro (5V), a Pololulu TB6612FNG motor controller, a PING ultra-sonic sensor, an RGB LED, two microswitches with pull-down resistors, a buzzer, and an APC220 RF module.
All in all, I tried to make him as convenient to extend as possible. As well, he is designed for very good collision detection and avoidance. So far, he detects almost all obstacles. If there’s anything I can add, it’s probably an IR sensor (I have a few spare ones lying around) and another IR sensor for floor detection (a flight of stairs could wreck him).
My motivation with this robot was to make a sturdy robotic platform. I could have bought one, but I think it’s better to build one for learning and experience. Building from scratch also adds complete control over the design, as well as the advantage of knowing the platform inside out.
So far, I’ve programmed a basic object avoidance pattern as a demo. I also plan to program an app for wireless control through a computer. Here’s the object avoidance code: https://pastebin.com/xK8xBpa2
For the construction, I used a Dremel tool, screws, nuts and bolts, breadboards, headers, jumper wires, my soldering station, jar covers, elastic bands, Solarbotics wheels, a plastic box, and some polymorph.



And here is a video (I’ll film a better version someday):